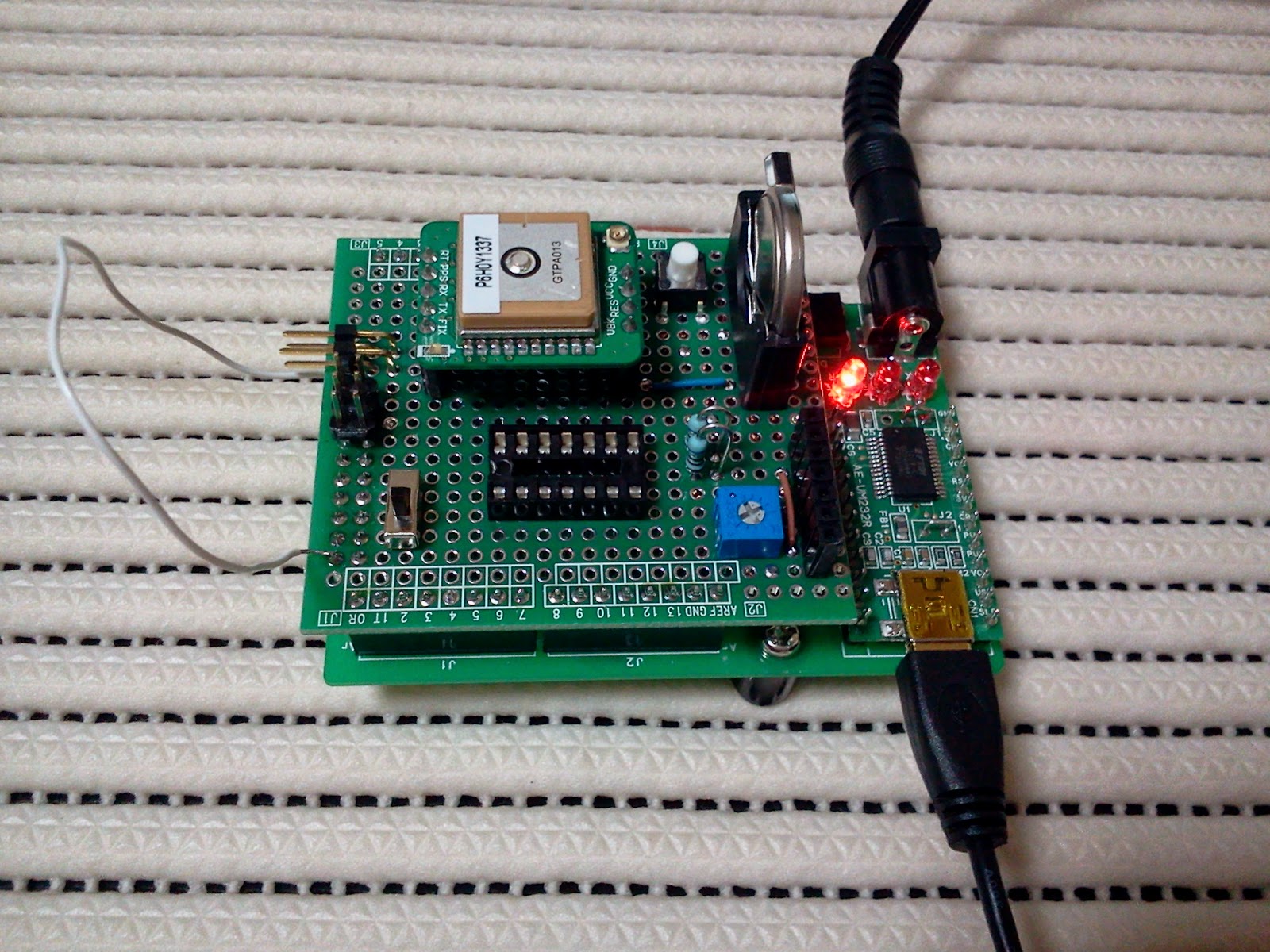
16個を順番に点灯させてみました。

//daikunomokichi 2019-12-08
const int d_pin0 = 0; // LED connected to digital pin 0
const int d_pin1 = 1; // LED connected to digital pin 1
const int d_pin2 = 2; // LED connected to digital pin 2
const int d_pin3 = 3; // LED connected to digital pin 3
const int d_pin4 = 4; // LED connected to digital pin 4
const int d_pin5 = 5; // LED connected to digital pin 5
const int d_pin6 = 6; // LED connected to digital pin 6
const int d_pin7 = 7; // LED connected to digital pin 7
const int d_pin8 = 8; // LED connected to digital pin 8
const int d_pin9 = 9; // LED connected to digital pin 9
const int d_pin10 = 10; // LED connected to digital pin 10
const int d_pin11 = 11; // LED connected to digital pin 11
const int d_pin12 = 12; // LED connected to digital pin 12
const int d_pin13 = 13; // LED connected to digital pin 13
const int d_pin14 = 14; // LED connected to digital pin 14 A0
const int d_pin15 = 15; // LED connected to digital pin 15 A1
const int d_pin16 = 16; // LED connected to digital pin 16 A2
void setup() {
pinMode( d_pin0, OUTPUT ); // sets the digital pin as output
pinMode( d_pin1, OUTPUT ); // sets the digital pin as output
pinMode( d_pin2, OUTPUT ); // sets the digital pin as output
pinMode( d_pin3, OUTPUT ); // sets the digital pin as output
pinMode( d_pin4, OUTPUT ); // sets the digital pin as output
pinMode( d_pin5, OUTPUT ); // sets the digital pin as output
pinMode( d_pin6, OUTPUT ); // sets the digital pin as output
pinMode( d_pin7, OUTPUT ); // sets the digital pin as output
pinMode( d_pin8, OUTPUT ); // sets the digital pin as output
pinMode( d_pin9, OUTPUT ); // sets the digital pin as output
pinMode( d_pin10, OUTPUT ); // sets the digital pin as output
pinMode( d_pin11, OUTPUT ); // sets the digital pin as output
pinMode( d_pin12, OUTPUT ); // sets the digital pin as output
pinMode( d_pin14, OUTPUT ); // sets the digital pin as output A0
pinMode( d_pin15, OUTPUT ); // sets the digital pin as output A1
pinMode( d_pin16, OUTPUT ); // sets the digital pin as output A2
pinMode( d_pin13, INPUT ); // sets the digital pin as input
digitalWrite(d_pin13, HIGH);
delay( 2000 );
digitalWrite( d_pin0, HIGH ); // sets the LED off
digitalWrite( d_pin1, HIGH ); // sets the LED off
digitalWrite( d_pin2, HIGH ); // sets the LED off
digitalWrite( d_pin3, HIGH ); // sets the LED off
digitalWrite( d_pin4, HIGH ); // sets the LED off
digitalWrite( d_pin5, HIGH ); // sets the LED off
digitalWrite( d_pin6, HIGH ); // sets the LED off
digitalWrite( d_pin7, HIGH ); // sets the LED off
digitalWrite( d_pin8, HIGH ); // sets the LED off
digitalWrite( d_pin9, HIGH ); // sets the LED off
digitalWrite( d_pin10, HIGH ); // sets the LED off
digitalWrite( d_pin11, HIGH ); // sets the LED off
digitalWrite( d_pin12, HIGH ); // sets the LED off
digitalWrite( d_pin14, HIGH ); // sets the LED off
digitalWrite( d_pin15, HIGH ); // sets the LED off
digitalWrite( d_pin16, HIGH ); // sets the LED off
delay( 1000 );
}
void loop() {
digitalWrite( d_pin0, LOW ); // sets the LED on
delay( 1000 ); // waits for a second
digitalWrite( d_pin0, HIGH ); // sets the LED off
digitalWrite( d_pin1, LOW ); // sets the LED on
delay( 1000 ); // waits for a second
digitalWrite( d_pin1, HIGH ); // sets the LED off
digitalWrite( d_pin2, LOW ); // sets the LED on
delay( 1000 ); // waits for a second
digitalWrite( d_pin2, HIGH ); // sets the LED off
digitalWrite( d_pin3, LOW ); // sets the LED on
delay( 1000 ); // waits for a second
digitalWrite( d_pin3, HIGH ); // sets the LED off
digitalWrite( d_pin4, LOW ); // sets the LED on
delay( 1000 ); // waits for a second
digitalWrite( d_pin4, HIGH ); // sets the LED off
digitalWrite( d_pin5, LOW ); // sets the LED on
delay( 1000 ); // waits for a second
digitalWrite( d_pin5, HIGH ); // sets the LED off
digitalWrite( d_pin6, LOW ); // sets the LED on
delay( 1000 ); // waits for a second
digitalWrite( d_pin6, HIGH ); // sets the LED off
digitalWrite( d_pin7, LOW ); // sets the LED on
delay( 1000 ); // waits for a second
digitalWrite( d_pin7, HIGH ); // sets the LED off
digitalWrite( d_pin8, LOW ); // sets the LED on
delay( 1000 ); // waits for a second
digitalWrite( d_pin8, HIGH ); // sets the LED off
digitalWrite( d_pin9, LOW ); // sets the LED on
delay( 1000 ); // waits for a second
digitalWrite( d_pin9, HIGH ); // sets the LED off
digitalWrite( d_pin10, LOW ); // sets the LED on
delay( 1000 ); // waits for a second
digitalWrite( d_pin10, HIGH ); // sets the LED off
digitalWrite( d_pin11, LOW ); // sets the LED on
delay( 1000 ); // waits for a second
digitalWrite( d_pin11, HIGH ); // sets the LED off
digitalWrite( d_pin12, LOW ); // sets the LED on
delay( 1000 ); // waits for a second
digitalWrite( d_pin12, HIGH ); // sets the LED off
digitalWrite( d_pin14, LOW ); // sets the LED on
delay( 1000 ); // waits for a second
digitalWrite( d_pin14, HIGH ); // sets the LED off
digitalWrite( d_pin15, LOW ); // sets the LED on
delay( 1000 ); // waits for a second
digitalWrite( d_pin15, HIGH ); // sets the LED off
digitalWrite( d_pin16, LOW ); // sets the LED on
delay( 1000 ); // waits for a second
digitalWrite( d_pin16, HIGH ); // sets the LED off
}